|
Rain(Tianyu) Sun Ph.D. student, S-Lab, College of Computing and Data Science, Nanyang Technological University. Google Scholar / Twitter / Github I am a Ph.D. student in computer science at Nanyang Technological University advised by Prof. Guosheng Lin. My research interests include video generation, 3D computer vision, and robot learning. I am currently working on motion representations for character animation. |

|
|
I received my M.E. in electronic information from Tsinghua University in 2024, fortunately advised by Prof. Guijin Wang. Before that, I obtained my B.E. in electronic science and technology and B.Ec. from Tsinghua University in 2021. I also had the pleasure of collaborating with Prof. Paul Bogdan (USC), Prof. Jing-hao Xue (UCL), and Prof. Hengshuang Zhao (HKU). |
News[2025.1] One paper on point cloud perception has been accepted by ICRA 2025! [2025.1] One paper on object manipulation has been accepted by RA-L! |
ResearchI'm interested in computer vision, generative AI, and robot learning. Most of my research is about inferring the physical world (shape, motion, color, light, etc) from images, usually with radiance fields. |
|
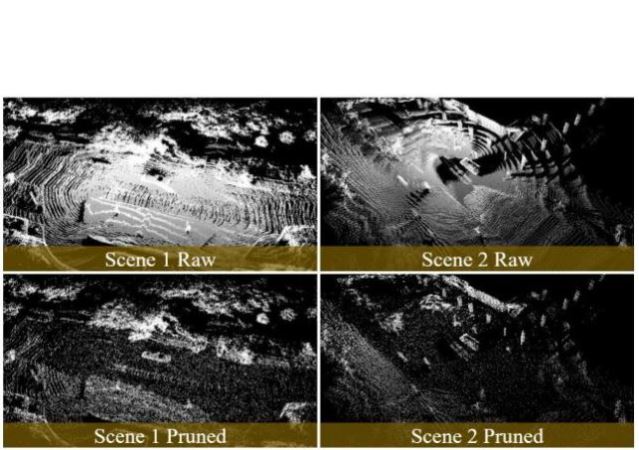
Efficient 3D Perception on Multi-Sweep Point Cloud with Gumbel Spatial Pruning
Tianyu Sun*, Jianhao Li*, Xueqian Zhang, Zhongdao Wang, Bailan Feng, Ke Xu, Hengshuang Zhao IEEE International Conference on Robotics and Automation (ICRA), 2025 Paper A simple yet effective Gumbel Spatial Pruning (GSP) layer that dynamically prunes points based on a learned end-to-end sampling. |
|
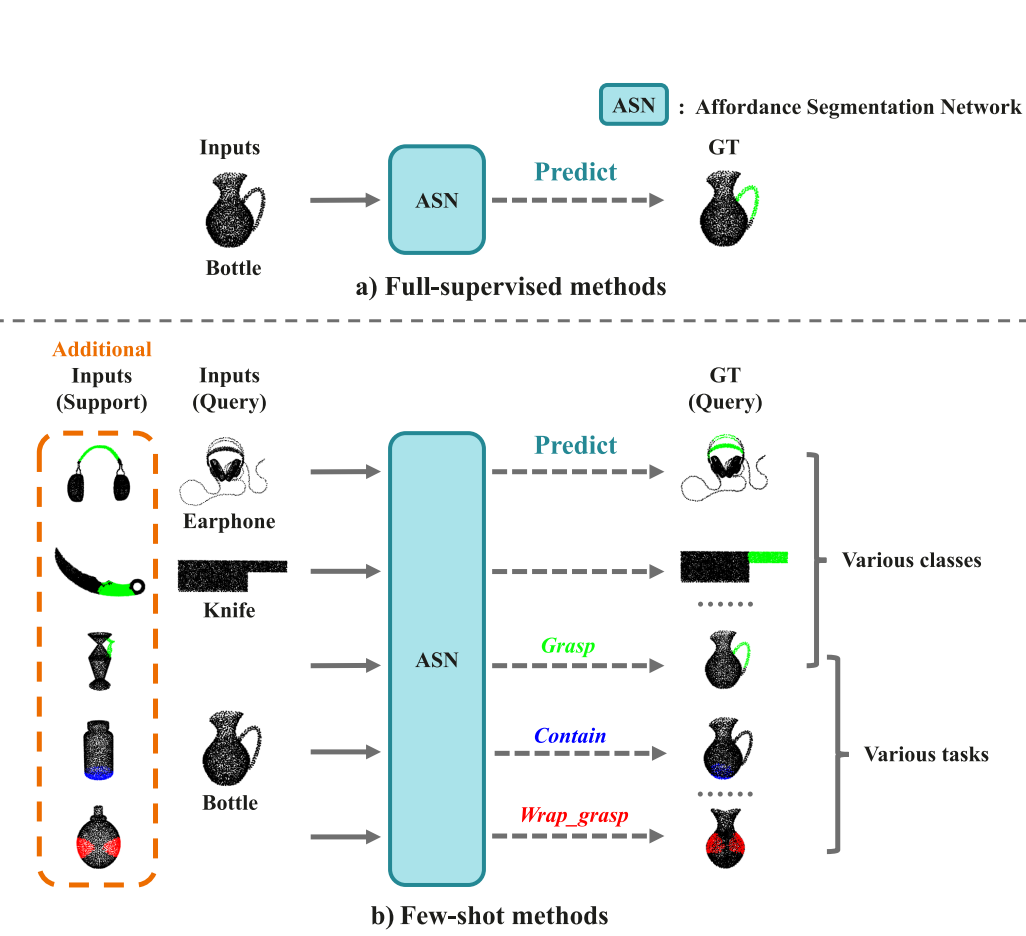
Variation-Robust Few-Shot 3D Affordance Segmentation for Robotic Manipulation
Dingchang Hu*, Tianyu Sun*, Pengwei Xie, Siang Chen, Huazhong Yang, Guijin Wang IEEE Robotics and Automation Letters (RA-L), 2025 Paper An orientation-tolerant feature extractor to address pose variation between support and query point cloud objects, and present a multi-scale label propagation algorithm for variation in completeness. |
|
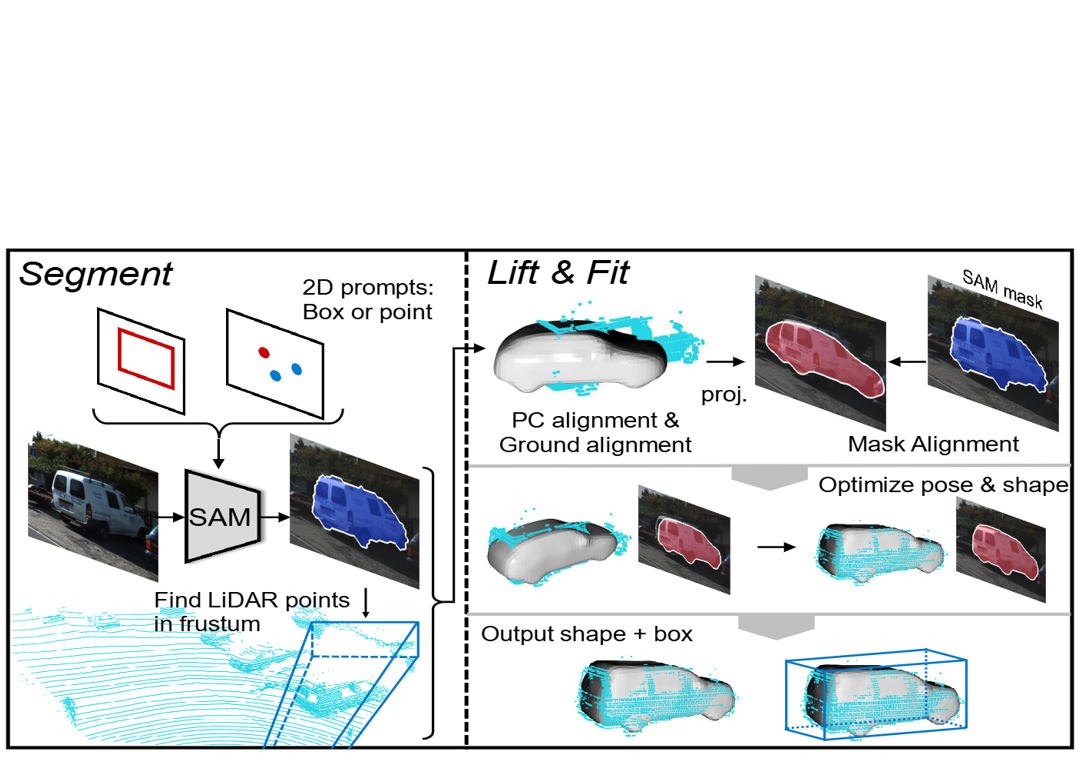
Segment, Lift and Fit: Automatic 3D Shape Labeling from 2D Prompts
Jianhao Li*, Tianyu Sun*, Zhongdao Wang, Enze Xie, Bailan Feng, Hongbo Zhang, Ze Yuan, Ke Xu, Jiaheng Liu, Ping Luo European Conference on Computer Vision (ECCV), 2024 Paper A Segment, Lift, and Fit (SLF) paradigm to predict 3D shapes of objects from 2D prior, not requiring training on a specific dataset. |
|
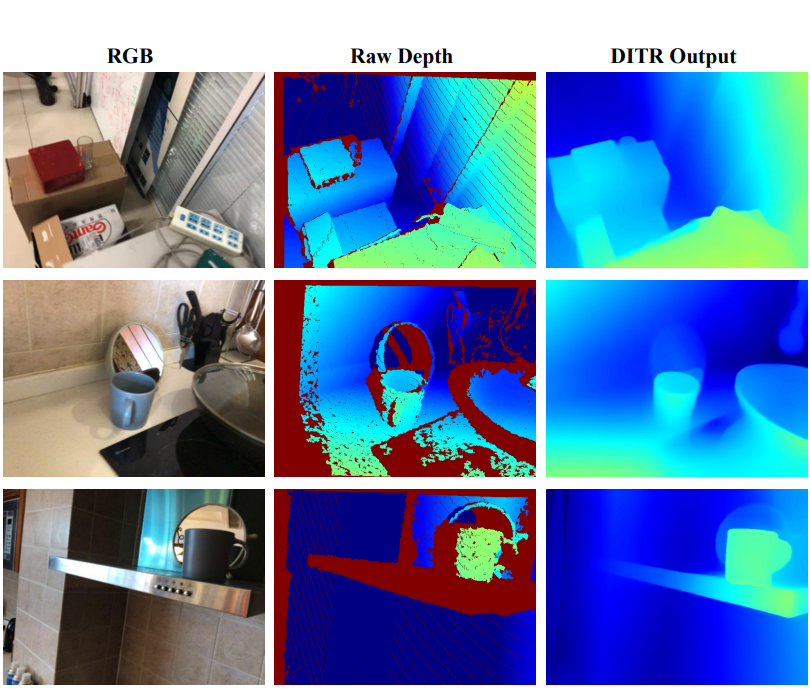
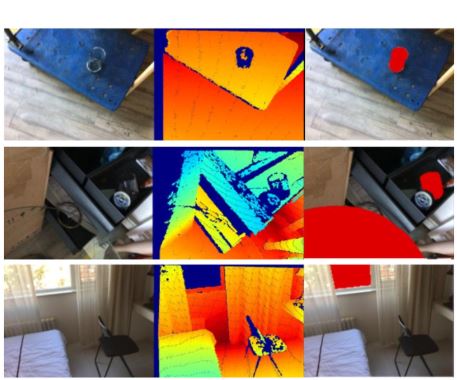
Diffusion-based depth inpainting for transparent and reflective objects
Tianyu Sun*, Dingchang Hu*, Yixiang Dai, Guijin Wang IEEE Transactions on Circuits and Systems for Video Technology (TCSVT), 2024 Paper A diffusion-based Depth Inpainting framework specifically designed for Transparent and Reflective objects. |
|
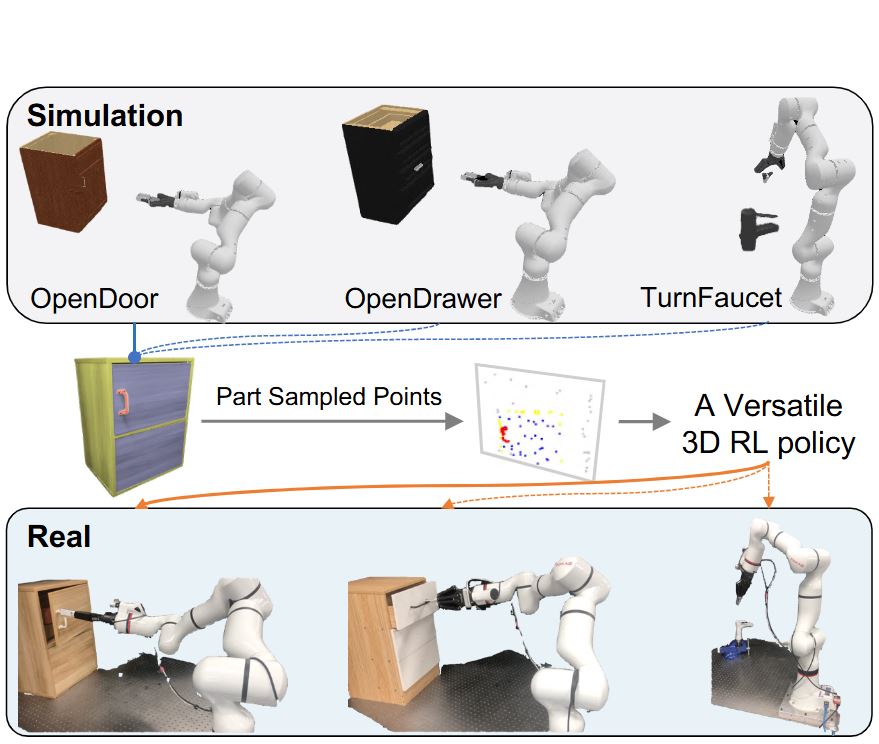
Part-guided 3D RL for Sim2Real articulated object manipulation
Pengwei Xie*, Rui Chen*, Siang Chen*, Yuzhe Qin, Fanbo Xiang, Tianyu Sun, Jing Xu, Guijin Wang, Hao Su IEEE Robotics and Automation Letters (RA-L), 2023 Paper | Code | Video A novel part-guided 3D RL framework, which can learn to manipulate articulated objects without demonstrations, combining the strengths of 2D segmentation and 3D RL to improve the efficiency of RL policy training. |
|
TROSD: A New RGB-D Dataset for Transparent and Reflective Object Segmentation in Practice
Tianyu Sun, Guodong Zhang, Wenming Yang, Jing-hao Xue, Guijin Wang IEEE Transactions on Circuits and Systems for Video Technology (TCSVT), 2023 Project | Paper | Github | Code Ocean | Data A new large-scale real-world RGB-D dataset for transparent and reflective object segmentation, and a novel network for transparent and reflective object segmentation. |
Professional ServicesConference Reviewer: CVPR, ICCV, ECCV, ICRA, IROS. Journal Reviewer: TCSVT, RA-L, KBS. |
Teaching |

|
Teaching Assistant, Pattern Recognition (60230023-0), Spring 2023 Teaching Assistant, Digital Image Processing (30230703-1), Spring 2024 |
|
This homepage is heavily built on the source code of homepage of Jon Barron. |